“하드웨어 없이 데이터 흐름 감 잡기”
- 센서 데이터 생성
- BLE 지연 생성
- 그걸 합쳐서 탐지·로깅하는 흐름
→ 까다로운 IDF 설치나 빌드 오류에 막히지 않고
→ 진짜 하드웨어 없이도 “내가 설계한 파이프라인이 동작하긴 하네”를 바로 확인
<목표>
- 하드웨어 없이
- 전체 IDS 파이프라인(센서→탐지→로깅→알림) 을
- 가짜 데이터로 빠르게 돌려 보자
1️⃣ : 센서 태스크 시뮬 (sensor_sim.py)
- 터미널 열고 파이썬 버전 및 설치 확인
python3 —version
- 작업파일이 저장될 장소로 이동
cd ~/Downloads
- 텍스트 에디터를 열고 코드 저장
nano sensor_sim.pyimport time, random while True: t = time.time() # Unix epoch 기준 현재 시각 초 단위 hall = random.choice([0, 1]) imu = abs(random.gauss(0, 0.2)) # 0주변, 표준편차 0.2, 항상 양수(abs) print(f"{t:.3f},SENSOR, hall={hall}, imu={imu:.2f}") time.sleep(0.01) # 1초=1,000ms, 1,000 ms÷10 ms = 100HzCtrl+O(Write Out)→ Ctrl+X 누르면 nano 에디터가 종료되고 다시 터미널 프롬프트로 돌아감

→ 누르면 화면 아래에 File Name to Write: sensor_sim.py 라고 뜸
→ 그냥 엔터 치면 저장 완료
4. 3번에서 저장한 파일 실행
python3 sensor_sim.py
- 결과 확인하고
Ctrl + C로 멈추기

- 의미 해석
- (Unix epoch 기준) 1970년 1월 1일 0시부터 흐른 “현재 시각”을 초 단위 실수로 보여줌
- SENSOR 태그는 “이 줄이 센서 이벤트”라는 표시
- hall=0/1 은 Hall 센서가 “잠금 상태(0) vs 열린 상태(1)”
- imu=숫자 는 “진동·가속도 세기”
2️⃣ : BLE 시뮬 (ble_sim.py)
네트워크 지연(RTT)을 가짜로 만들어보는 시뮬레이션
- 텍스트 에디터를 열고 코드 저장
nano ble_sim.py - 파일 실행하고 출력 결과 확인
python3 ble_sim.py
import time, random
# BLE ping-pong 시뮬: 10~50ms 랜덤 지연
while True:
t1 = time.time()
delay = random.uniform(0.01, 0.05) # 10~50ms 사이의 실수 하나를 랜덤 선택
time.sleep(delay) # 지연을 흉내
t2 = time.time() # pong 받은 시점 기록
rtt_ms = (t2 - t1) * 1000 # t2–t1은 왕복지연(sec단위), *1000은 ms단위로
print(f"{t2:.3f},BLE, rtt={rtt_ms:.1f}ms")
time.sleep(0.5) # 500ms 주기로 pingCtrl+O (Write Out) → 누르면 화면 아래에 File Name to Write: sensor_sim.py 라고 뜸
→ 그냥 엔터 치면 저장 완료
- 파일 실행 → 결과 확인하고 Ctrl+C 눌러서 멈추기
python3 ble_sim.py

- 데이터 분석
- (Unix epoch 기준) 현재 시각
- BLE 태그
- RTT 통신 지연 시간 (요청(Ping) 보낸 시점부터 응답(Pong) 받은 시점까지 걸린 시간
오탐(false positive) 위험
사용자 주변 환경(신호 세기 약함·장애물·폰 성능 저하) 때문에 실제로는 공격이 아닌데 RTT가 일시적으로 올라가서 “공격”으로 잘못 감지할 수 있음
- 보완
- 다중 비교
- 한 번이 아니라 연속 N회(rtt > T) 조건 부여
- ex) “3회 연속 20 ms 초과” 일 때만 탐지
- 센서 퓨전
- BLE RTT 외에 Hall/IMU 센서 이벤트와 함께 판정
- ex) rtt>20 ms AND imu>RMS_threshold AND hall==LOCKED
- 동적 임계치 조정
- 평소 평균 RTT + α·표준편차 방식으로 가변 임계치 사용
- 환경 보정
- 신호 강도(RSSI) 정보도 같이 보고, RSSI가 너무 낮으면 “신호 약함”으로 분류
- 다중 비교
3️⃣ : 로그 합치고 rule-based 탐지 구현
- 로그 합치기 → 센서·네트워크 이벤트를 시간 순으로 나란히 비교
- 룰 기반 탐지 → 간단한 조건으로 “이럴 때 공격”을 빠르게 걸러 보고, 기준값을 잡기
A. 로그 파일 준비하기
- 센서 로그 수집
- sensor_sim.py를 실행하면서 출력 결과를 파일에 저장
python3 sensor_sim.py > sensor.log
- 몇 초간(예: 5초) 그대로 둔 뒤, Ctrl+C 로 멈추고 sensor.log에 저장된 데이터 확인
- sensor_sim.py를 실행하면서 출력 결과를 파일에 저장
- ble 로그 수집
- 다른 터미널 열고
- ble_sim.py 실행하고 출력 결과 파일에 저장
python3 ble_sim.py > ble.log

B. 로그 합치기 스크립트 만들기 (detect.py)
merged.csv에 멀티모달 데이터가 잘 정리됐는지 확인하고, 그 위에 탐지 룰을 적용
- 새 파이썬 파일 생성
nano detect.py- sensor.log와 ble.log를 읽어서
- 타임스탬프 기준으로 정렬
- merged.csv라는 하나의 표(시간·타입·값1·값2)로 저장
- sensor.log와 ble.log를 읽어서
- 코드 붙여넣고 저장→ 붙여넣고 → Ctrl + O → enter → Ctrl + x
import csv # 1) sensor.log와 ble.log 파일을 각각 한 줄씩 읽어 들여, events = [] # 로그 이벤트를 모두 담을 빈 리스트 마련 for line in open('sensor.log'): t_str, _type, rest = line.strip().split(',', 2) # 시간·타입·나머지(값)로 분리 events.append((float(t_str), 'sensor', rest)) # 리스트에 (시간, 종류, 나머지 문자열) 튜플로 저장 for line in open('ble.log'): # BLE 로그도 같은 방식으로 이벤트에 저장 t_str, _type, rest = line.strip().split(',', 2) events.append((float(t_str), 'ble', rest)) # 2) 시간순으로 정렬 events.sort(key=lambda x: x[0]) # 3) merged.csv 파일에 쓰기 # merged.csv'라는 이름으로 새 파일을 만들거나, 이미 있으면 덮어쓰기 모드('w') with open('merged.csv', 'w', newline='') as f: writer = csv.writer(f) # 한 줄씩 CSV 형식으로 작성 writer.writerow(['time', 'type', 'val1', 'val2']) # CSV 첫 줄: 컬럼 이름 for t, typ, rest in events: if typ == 'sensor': # 센서로그이면 # 출력 포맷 정리 hall_str, imu_str = [s.strip() for s in rest.split(',')] hall = hall_str.split('=')[1] imu = imu_str.split('=')[1] writer.writerow([t, 'sensor', hall, imu]) else: # ble 로그이면 # 출력 포맷 정리 rtt_str = rest.strip().split('=')[1] rtt = rtt_str.replace('ms','') writer.writerow([t, 'ble', rtt, ''])
- detect.py와 alert.py를 분리한 이유
- 로그 합치기(시뮬데이터 통합)는 탐지 로직과는 별개의 작업이어서
- “데이터 준비” 단계 → “탐지” 단계
- 책임을 분리하면 유지보수·디버깅이 쉬워짐
C. 합치고 실행해 보기 (merged.csv)
sensor.log와 ble.log에 저장된 이벤트들을 “시간순으로” 한 파일에 엮어 놓은 CSV(표) 파일→ 센서 이벤트와 BLE 이벤트를 동시에 비교해야만 “멀티모달” 탐지가 가능
- 터미널에서 실행
python3 detect.py
- 해당 경로로 가면 merged.csv 파일 생성되어 있음
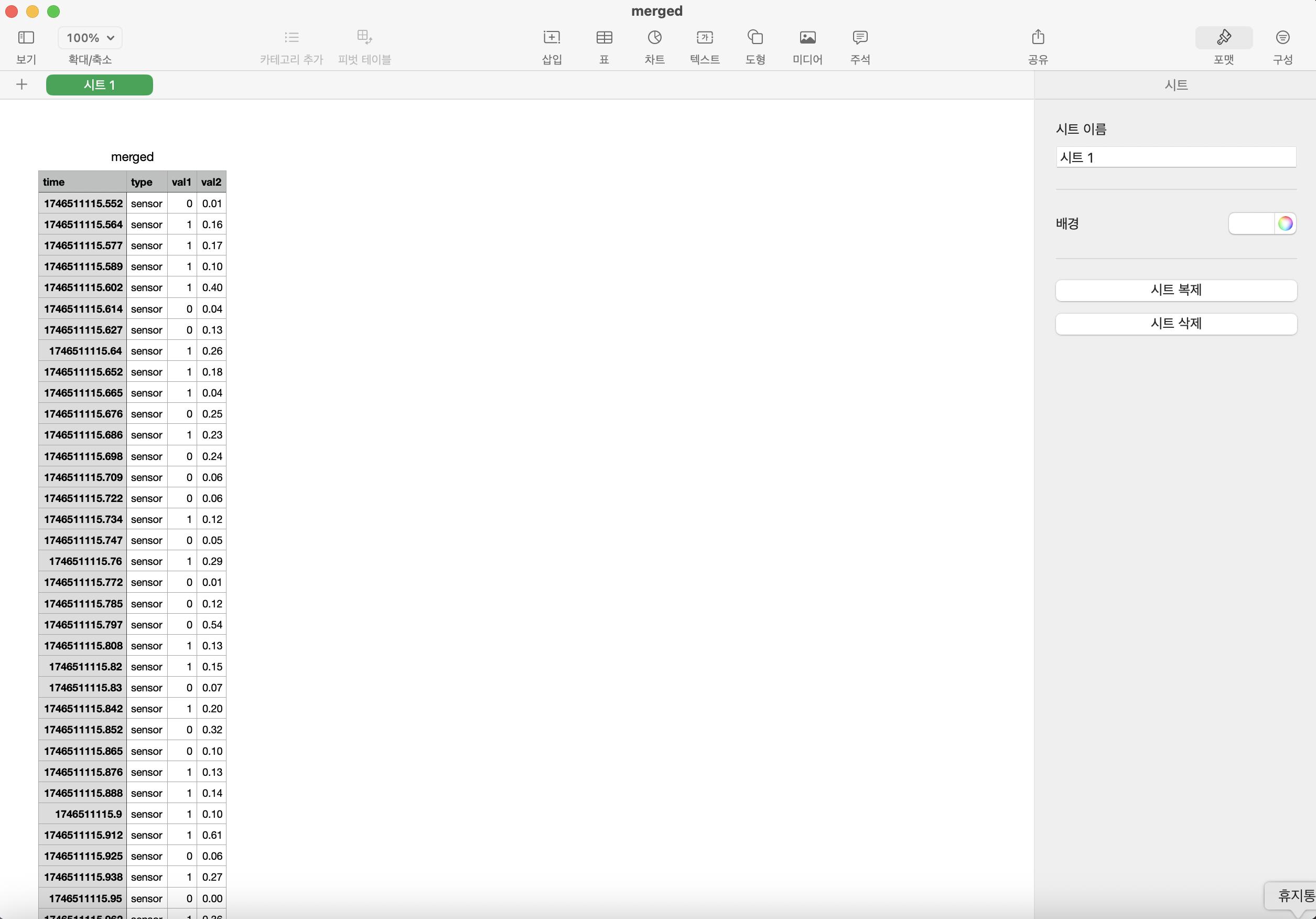
- 데이터 분석
- time: 이벤트 발생 시각
- type: 이벤트 종류(sensor/ble)
- val1: sensor → hall값, ble → rtt(ms)
- val2: sensor → imu값, ble → (빈칸)
D. 룰 기반 탐지 적용하기 (alert.py)
간단한 룰로 이상 감지 해보기
→ merged.csv를 읽고 “룰 기반 탐지”를 실제로 수행해서
→
이상 이벤트 목록을 뽑아 터미널에 출력하는 스크립트
- 터미널에 새로 파일 생성해서 아래 코드 저장
nano alert.py→ Ctrl+o → enter → Ctrl+x
# 1) CSV 모듈 불러오기 import csv # 2) 이상 탐지 결과를 모아 둘 빈 리스트 준비 alerts = [] # 3) merged.csv 파일을 헤더(첫 줄) 기준으로 읽어 들이기 with open('merged.csv', newline='') as f: reader = csv.DictReader(f) # 4) 한 줄씩 순회하면서 for row in reader: # 5) CSV 각 칼럼을 변수에 저장 # row['time'] : 문자열로 된 시간 정보 # row['type'] : 'sensor' 또는 'ble' # row['val1'] : hall 값 또는 rtt 값 # row['val2'] : imu 값 (BLE는 빈 문자열) t = float(row['time']) # 문자열 → 숫자(소수) typ = row['type'] # 'sensor' 아니면 'ble' v1 = float(row['val1']) # val1을 숫자로 변환 v2 = float(row['val2']) if row['val2'] else None # val2가 있으면 숫자로, 없으면 None # 6) 룰 1: BLE(rtt) 이 20 ms 초과하면 이상 판정 if typ == 'ble' and v1 > 20.0: # 이상이면 alerts 리스트에 (시간, 라벨, 값) 추가 alerts.append((t, 'HighRTT', v1)) # 7) 룰 2: Sensor(imu) 이 0.5 초과하면 이상 판정 if typ == 'sensor' and v2 is not None and v2 > 0.5: alerts.append((t, 'HighIMU', v2)) # 8) 최종 이상 이벤트를 출력 for atime, label, val in alerts: print(f"ALERT at {atime:.3f}: {label} = {val}")
- 터미널에서 실행
python3 alert.py

- 결과 분석
- merged.csv를 읽어서 알림 로그를 출력
- 데이터 준비(merged.csv 생성)와 탐지 알고리즘(alert 판정)을 분리하면
- 탐지 규칙을 바꿀 때마다 데이터 합치기 코드를 손대지 않아도 됨
- 후에 ML 기반 탐지 모델로 교체해도, 데이터 준비 파이프라인은 그대로 재사용 가능
'Tracker > experiments' 카테고리의 다른 글
| GPT 응답 자동화: Notion API 통합 설정 (macOS) (4) | 2025.04.23 |
|---|